Overview
My research is guided by my passion to see multi-robot systems function in the real world. In pursuit of this goal, I have focused on solving practical, fundamental challenges at the intersection of robotics and wireless systems using search based planning, optimization and machine learning.
While there exists a considerable body of literature on multi-robot systems, it remains a daunting task to field a team of robots outside of structured lab environments with fixed infrastructure. For those that have tried, one of the first assumptions to break is the availability of communication, a fundamental requirement for any team that seeks to coordinate their actions when accomplishing a shared objective. My recent work has focused on enabling such multi-robot systems by using mobile robots as robust, adaptive wireless infrastructure to meet communication demands.
Previously, I worked on multi-robot exploration using information theory where I experienced the challenges of multi-robot systems in the wild first hand.
For a full list of my publications visit my Google Scholar page.
Select Projects
Learning Connectivity-Maximizing Network Configurations
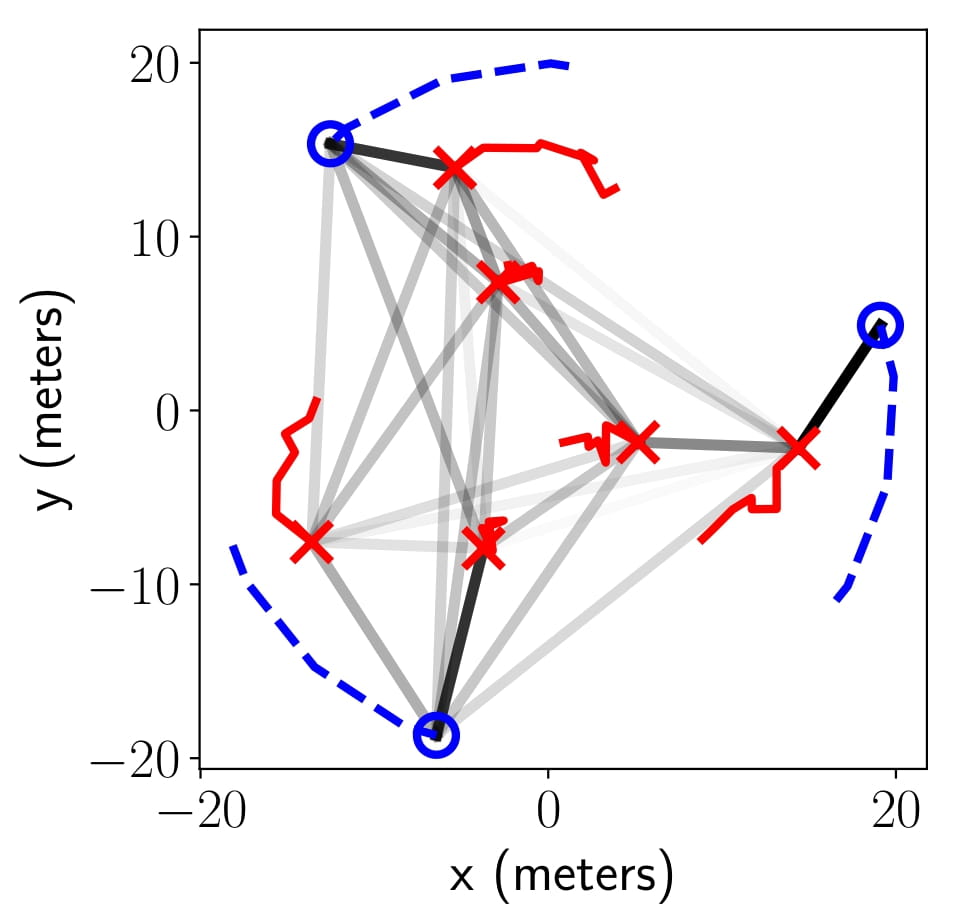
Preserving or maximizing the algebraic-connectivity of a state-dependent communication graph has been the most popular method for ensuring robot teams remain in proximity to one another and, by proxy, able to communicate. While many approaches have been developed to solve this problem, we still lack a solution that scales favorabily with the size of the team: centralized optimization approaches become computationally expensive for more than a few agents and distributed algorithms suffer from slow convergence compared to the dynamics of the team. In this work, we propose a data-driven approach based on convolutional neural networks that leverages the speed of inference to produce connectivity-maximizing network configurations orders of magnitude faster than existing methods.
Publications
Daniel Mox, Vijay Kumar, Alejandro Ribeiro, "Learning Connectivity-Maximizing Network Configurations," IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5552-5559, April 2022 paper, recorded presentation
Mobile Wireless Infrastructure on Demand
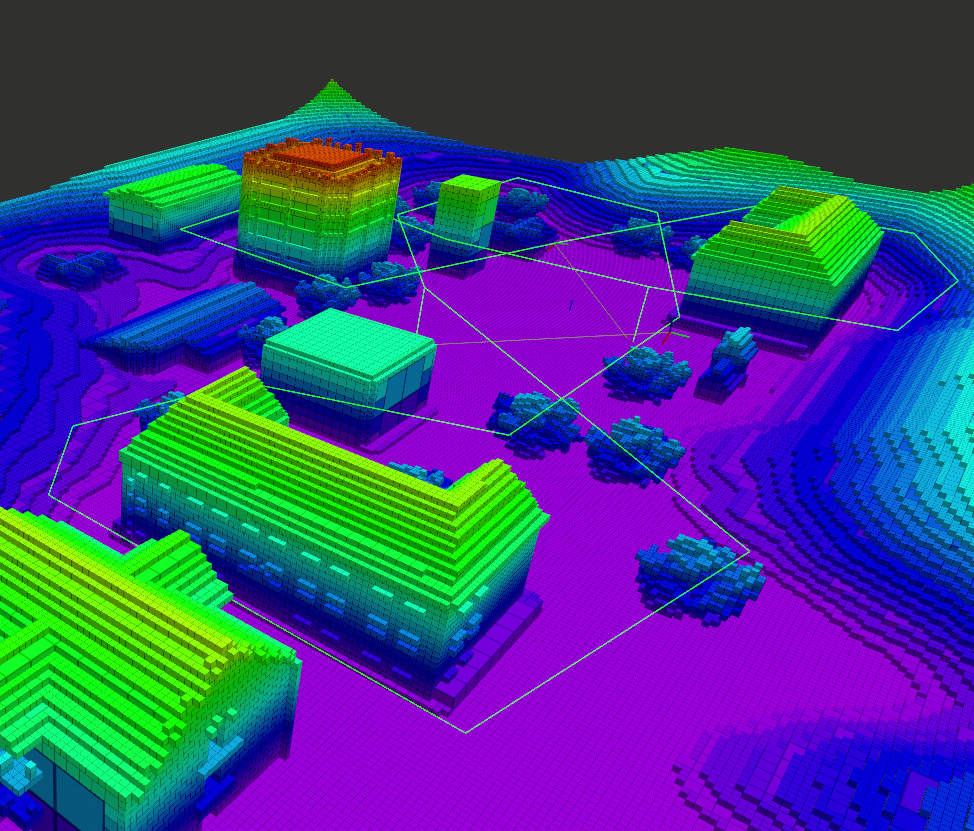
In this work, we introduce the problem of Mobile Wireless Infrastructure on Demand, where robots acting as wireless routers dynamically position themselves to create and sustain a wireless network that serves the communication requirements of a set of mobile client nodes. We develop a sample based planner that adjusts the position of the network robots in order to increase the performance of an underlying robust packet routing algorithm, which offers probabilistic guarantees on the availability of network resources. We demonstrate our system in Gazebo simulations and through experiments with a team of quadrotors, where we implement our motion planning approach in C++ with ROS and integrate our communication strategy with the native Linux 802.11 networking stack.
Publications
Daniel Mox, Miguel Calvo-Fullana, Mikhail Gerasimenko, Jonathan Fink, Vijay Kumar, Alejandro Ribeiro. "Mobile Wireless Network Infrastructure on Demand." International Conference on Robotics and Automation (ICRA) 2020. paper, recorded presentation
Simulating Communication in Robotics
The ability to conduct meaningful simulations is critical to the development of high performance, robust robotic systems. Simulators enable developers to thoroughly prototype and test algorithms before conducting costly, and often dangerous, experiments on expensive physical platforms. However, the value of any simulator is in the degree to which it captures aspects of the physical world relevant to the application. While the physics and rendering capabilities of robotics simulators have seen tremendous improvement over the years, the most popular frameworks still lack native support for simulating the communication networks that underly robot teams. As a solution to this problem, we developed a network simulation framework that integrates with the popular robotics simulator Gazebo. Our system extracts information about the state of robots in the environment required for wireless channel modeling and controls the simulation timestep in order to synchronize physics and rendering updates with event based communication simulators. We demonstrate the utility of our framework for simulating complex cyber-physical systems by showing 1) how distance and obstacles between robots impacts channel throughput and delay and 2) how noisy state estimates affect the performance of UAV synthetic aperture antenna arrays.
Publications
Miguel Calvo-Fullana, Daniel Mox, Alexander Pyattaev, Jonathan Fink, Vijay Kumar, and Alejandro Ribeiro. "Ros-netsim: A framework for the integration of robotic and network simulators." IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1120-1127, April 2021.
Miguel Calvo-Fullana, Alexander Pyattaev, Daniel Mox, Sergey Andreev, and Alejandro Ribeiro. "Communications and Robotics Simulation in UAVs: A Case Study on Aerial Synthetic Aperture Antennas." IEEE Communications Magazine, vol. 59, no. 1, pp. 22-27, January 2021.
Previous Projects
Information-Based Exploration with RGBD Panoramas
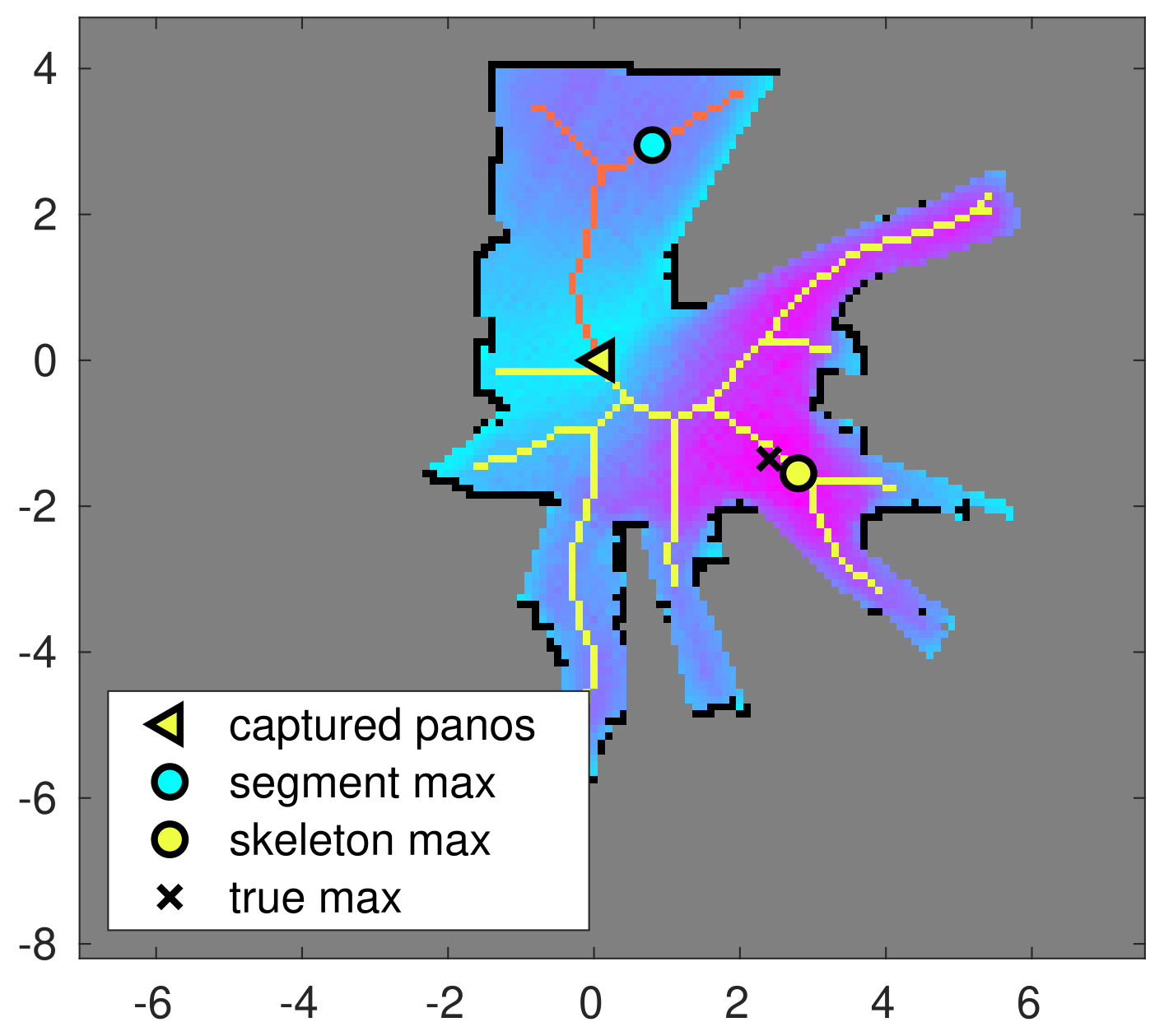
In this work we develop a multi-robot information based exploration strategy with the goal of constructing high resolution 3D maps of cluttered environments. We use a Cauchy-Schwarz Quadratic Mutual Information (CSQMI) based objective which operates on a novel angle enhanced occupancy grid to guide robots in the collection of RGBD panoramas, which have been shown provide memory efficient high quality representations of space. To intelligently collect panoramas, we introduce the angle enhanced occupancy grid which emphasizes perspective in addition to coverage, a characteristic we believe results in the construction of higher quality maps than traditional occupancy grid methods. To show this, we conduct simulations that compare our approach with frontier exploration and conduct experiments evaluating the performance of our method in a perception task.
Publications
Daniel Mox, Anthony Cowley, M. Ani Hsieh, and Camillo J. Taylor. "Evaluating the Effectiveness of Perspective Aware Planning with Panoramas." International Conference on Robotics and Automation (ICRA) 2019. paper
Daniel Mox, Anthony Cowley, M. Ani Hsieh, and Camillo J. Taylor. "Information based exploration with panoramas and angle occupancy grids." Distributed Autonomous Robotic Systems (DARS), pp. 45-58. Springer, Cham, 2018. paper